Разработка и применение медицинской робототехники, медицинских роботизированных устройств, автоматизированных технических систем в сфере здравоохранения сегодня происходит довольно успешно и имеет большой потенциал для дальнейшего развития1; 6. Причин столь бурного внедрения инновационных технологий в медицинскую практику несколько и это не только тяга к изобретательности, как способности человека, имеющей сугубо биологическое свойство, находить нестандартные решения проблем и жизненных задач.
С каждым годом население планеты растет быстрее, чем численность специалистов высокой квалификации. Особенно остро стоит дефицит медицинского персонала среднего уровня, тех самых специалистов, которые выполняют сложные, но рутинные задачи непосредственно «у постели больного» особенно в рамках комплексных программ медицинской реабилитации. Настоящая тенденция несомненно со временем приведет к тому, что опытные специалисты сконцентрируются на тех навыках, которые по тем или иным причинам не могут быть автоматизированы, а все остальные рабочие действия будут переданы в сферу полномочий роботизированных комплексов с функцией «искусственного интеллекта».
Кроме того, во время любой медицинской процедуры достаточно сложно точно контролировать протокол самой процедуры и тем более соблюдать конфиденциальность пациента и оптимальную для него «зону комфорта». Все это связано с так называемым человеческим фактором.
Эти и ряд других причин вынуждают организаторов здравоохранения задумываться над автоматизацией отдельных действий медицинского персонала при помощи роботизированных систем.
Закономерно, что использование именно медицинских роботов обладает явными преимуществами, позволяющими:
Наряду с роботизированными протезами и экзоскелетами («ReWalk», «ExoAtlet»), роботами-манекенами («SimMan 3G», «Simroid»), сервисными роботами-помощниками («Helpmate», «RP-8», «RIBA»), роботизированными реабилитационными системами (“Bi-odex”, “Lokomat”, “Con-trex”, “ReoGo”, “G-EO”, “С-MiLL”, "Erigo", “Armeo”), а также роботами-манипуляторами для хирургии, особенно микрохирургии («da Vinci», «Smart Tissue»), важным и перспективным направлением экспертами в области медицинской робототехники называются роботизированные установки для лечебных процедур у пациентов с патологией костно-мышечной системы, в частности манипуляционные роботы для выполнения приемов массажа и пассивных движений2.
Впервые реализованная идея управления аппаратными средствами для массажа с использованием робота была предложена российскими учеными на II симпозиуме по медицинской робототехнике в Гейдельберге в 1997 году. Шестизвенный промышленный робот «Puma 560», предназначенный для сборки и дуговой сварки, был дополнен силовым датчиком для измерения усилия взаимодействия инструмента робота с мягкими тканями пациента. Робот «чувствовал» пациента, запоминал его рельеф, упругость, затем вычислял массажные траектории и воспроизводил их своими приводами. Штатная система управления робота, предназначенная для позиционного и контурного управления, соответственно могла реализовать алгоритмы раздельного позиционно-силового управления. Робот выполнял отдельные приемы техники классического массажа и акупрессуры на манекенах, собаках и людях-волонтерах. Данный метод роботизированного массажа был защищен российским патентом3.
Впоследствии, разработанный отечественный роботизированный манипуляционный комплекс совершенствовался на базе Московского государственного индустриального университета и Национального медицинского исследовательского центра реабилитации курортологии Минздрава России4. Программное обеспечение робота-манипулятора было перенесено на базу коллаборативного робота OMRON TM5-700 (Япония), а также были добавлены диагностический тензоалгометрический блок и блок оборудования, предназначенный для создания трехмерной модели поверхности тела человека, и система температурного сканирования (картирования температуры поверхности тела пациента).
Позже аналогичные манипуляционные роботы были разработаны в Массачусетском технологическом институте, Пекинском университете, Сингапурском медицинском центре Kin Teck Tong, где проводились клинические апробации устройств на пациентах с травматическим эпикондилитом, болью в пояснице и ригидностью затылочных мышц и др. патологическими состояниями7; 8; 9; 10.
Однако при реализации предлагаемых моделей роботизированных систем по-прежнему остаются не решенными следующие организационно-технические проблемы:
Дизайн робота-манипулятора, помимо эстетических критериев, которые необходимы для использования в медицинских учреждениях, должен также опираться и на этические принципы робототехники5. Так, робот-ассистент, а робот для выполнения массажных манипуляций относится именно к этой категории:
В попытке решить если не все, то хотя бы часть указанных проблем в 2021 г. российской компанией Beautyliner Group был предложен для практического применения роботизированный массажный комплекс «Robosculptor» (рис. 1), в основе которого используются коллаборативный робот-манипулятор, снабженный массажной насадкой, высокоскоростная времяпролетная (FoT) камера для получения 3D-изображений пациента, инфракрасная камера для решения задач распознавания тела пациента, платформа для перемещения манипулятора вдоль тела человека, а также регулируемая кушетка, несущая рама комплекса и прочие вспомогательные системы.
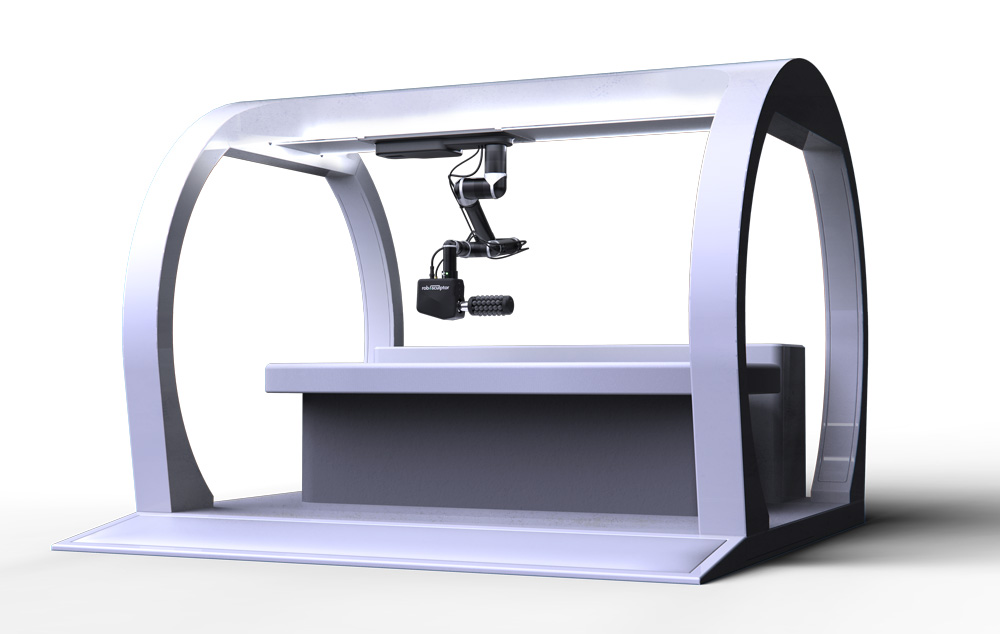
Рисунок 1. Общий вид роботизированного массажного комплекса «Robosculptor»
В основе организации роботизированной массажной процедуры могут лежать три подхода.
Первый заключается в том, что после процедуры 3D-сканирования пациента специалист при помощи интерфейса выбирает индивидуальную программу массажа из набора имеющихся стандартных наборов массажных комбинаций, учитывая индивидуальные особенности пациента. При запуске программы она будет исполняться на пациенте в соответствии с заданными параметрами роботом автоматически.
Второй подход заключается в том, чтобы обучить робот-манипулятор повторять массажные движения заданной силы, динамики и траектории за специалистом. Для этого, перемещая массную насадку при помощи задающей рукоятки в режиме пространственной демонстрации, специалист задает траектории перемещения массажного инструмента по поверхности тела пациента. Благодаря тому, что в момент записи траектории одновременно ведется мониторинг положения тела пациента посредством FoT-камеры, удается совместить и объединить полученные данные, спроецировав траектории перемещения инструмента на поверхность тела пациента. Данный метод позволяет динамически подстраивать массажные траектории в случае изменения положения тела или позы пациента во время сеанса. Представленный бионический подход к организации управления позволяет приблизить управление роботом к естественным действиям опытного массажиста – человека.
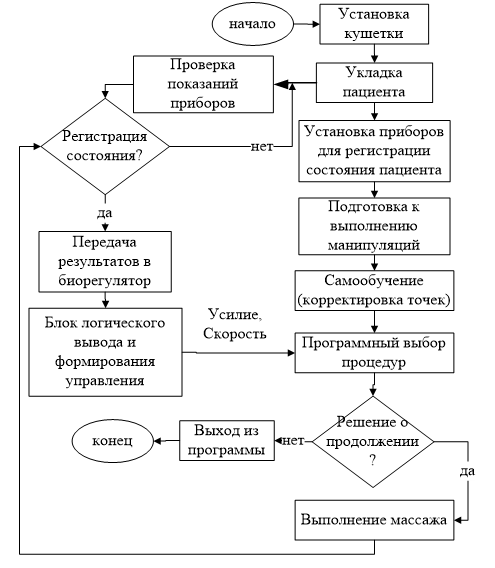
Общая схема алгоритма биотехнического управления
Процедура в этом случае проходит следующим образом: специалист анализирует первичную информацию о пациенте, после чего он располагается на кушетке, а оператор перемещает рукоятку, закрепленную на конечном звене робота и деформирует подлежащие мягкие ткани в соответствии с заданной методикой воздействия, а затем программно задается время воздействия и запускается автоматизированный протокол процедуры.
Программный алгоритм для биотехнического управления манипуляционным роботом для массажа представлен на схеме.
Третий подход основан на применении средств искусственного интеллекта. Благодаря наличию существенной выборки возможно проводить не только сегментацию тела пациента, но и определять его антропометрические параметры, строить программы массажа, учитывая индивидуальные особенности пациента.
Программа развития роботизированной системы предполагает разработку и применение различных массажных манипуляторов.
На текущий момент рабочим инструментом робототехнического комплекса выбрана массажная насадка, содержащая вращающийся барабан, состоящий из массажных силиконовых сфер диаметром 20 мм, объединенных в 10 групп по 6 сфер. Группы сфер расположены на барабане с взаимным смещением, для обеспечения высокой степени микрокомпрессии при взаимодействии с мягкими тканями пациента. Сферы свободно вращаются на осях барабана, имеют гладкую поверхность и обладают твердостью 70 либо 80 единиц по шкале Шора A. Диапазон регулировки скорости вращения барабана составляет от 100 до 450 об/мин. и контролируется электронной системой управления.

Рисунок 2. Манипула роботизированного массажного комплекса «Robosculptor»
Подобный массажный роллер применяется в аппарате Beautylizer российского производства. Эффективность метода подтверждена научными исследованиями11.
Благодаря использованию данной массажной насадки возможно выполнение всех 4-х групп массажных приемов (поглаживания, растирания, разминания, вибрации) в зависимости от регулируемого уровня силы прилегания инструмента к поверхности тела пациента.
Возможности применения роботизированного массажного комплекса уже сегодня реализованы для нужд коррекции эстетических недостатков мягких тканей. Однако потенциал его использования значительно шире.
В медицинской практике существует потребность в проведении коротких по времени и ограниченных по области воздействия массажных процедур. Так, в программах медицинской реабилитации пациентов с травмами и заболеваниями костно-мышечной системы есть необходимость в выполнении стереотипных массажных манипуляций на бедре, голени, плече, шейно-грудном отделе спины и т. п. как части комплекса мероприятий, предваряющих или завершающих использование других методов восстановительного лечения (лечебная гимнастика, аппаратная физиотерапия).
Более того, согласно Приказу Министерства здравоохранения РФ от 31 июля 2020 г. № 788н «Об утверждении Порядка организации медицинской реабилитации взрослых», в штатном расписании отделений медицинской реабилитации с 1 сентября 2023 г. планируется функциональные обязанности медицинских сестер по массажу, по физиотерапии и по лечебной физкультуре переложить на медицинских сестер по медицинской реабилитации. Но, безусловно, тот же объем работ они не в состоянии выполнить, тем более на том же уровне качества, как узкие специалисты. Закономерно, что в их сферу деятельности должны максимально включаться аппаратные роботизированные технологии, тем самым минимизируя высококвалифицированный ручной труд.
Таким образом, остро встает вопрос о подготовке специалистов, способных не только проводить мануальные массажные процедуры, знающих методологию применения механолечебного воздействия, но и обслуживать роботизированную технику, имеющих азы программирования в различных средах.
Сегодня дальнейшее создание и совершенствование робототехнических систем для манипуляции на мягких тканях в качестве лечебно-диагностического комплекса способно открыть новый подход к дозированному, а соответственно, и строго научному применению мануального воздействия в широкой клинической практике, и особенно в медицинской реабилитации, что в свою очередь раскрывает новые горизонты в развитии и совершенствовании как техники, так и методологии массажа и мануальной терапии и даже самих этих специальностей, в контексте парадигмы «4-й технологической революции»12.















 5370
5370


Комментарии